
在前面的分享中,我们介绍了在
ROS2、AcmeIot、PX4、AcmeGCS通过DDS互联实现实时可靠通信
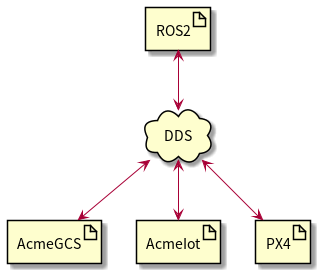
这一篇我们分享一下AcmeGCS实现DDS接口,与ROS2通信的框架
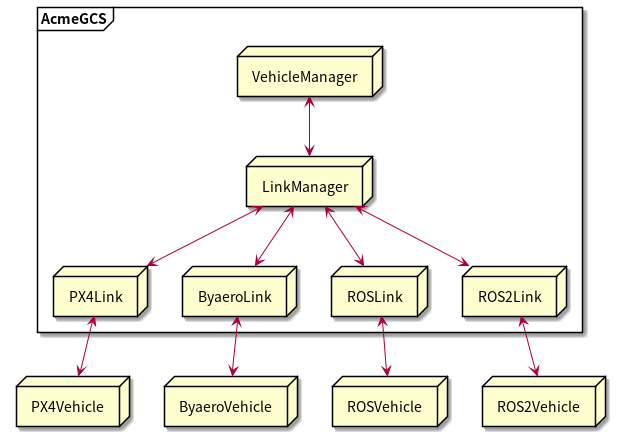
AcmeGCS通过Link抽象层管理不同的连接实现,DDS/ROS2作为Link层接入到AcmeGCS中,实现与应用层的隔离。
如下图所示:
在DDS的实现上,AcmeGCS参考了micro-ROS的结构,实现AcmeGCS的DDS接口,下图为micro-ROS的结构图
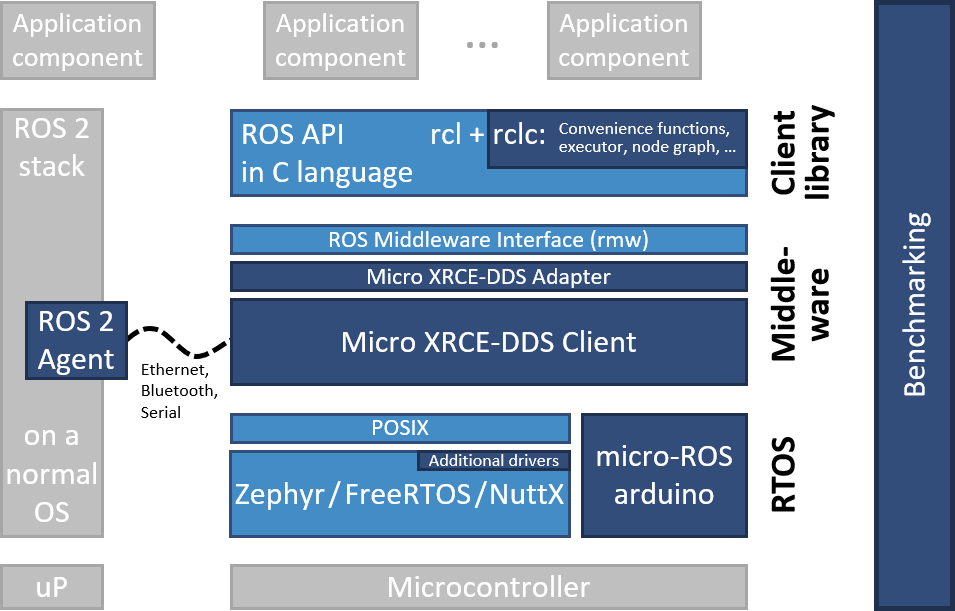
与micro-ROS相同,AcmeGCS添加Micro-XRCE-DDS-Client与Micro-CDR模块作为DDS的底层实现,在DDS层上,封装了轻量级的ROS2 API in C++,方便应用层进行ROS2消息的订阅和发布。
–
我的微信公众号,文章同步更新,欢迎关注。
