
AcmeUav的分享更新到现在,我们主要分享了几个部分的内容:
-
PX4
开源无人机飞控
-
AcmeGCS
3D环境态势显示与多无人平台控制的地面站软件。
-
AcmeIot
嵌入式设备的RTOS应用框架
以上三部分包含了一个无人系统框架的主要底层结构,在底层支持的基础上,实现复杂的应用算法,如
-
多机编队
-
目标识别与跟踪
-
SLAM
-
路径规划
ROS为这些上层算法在编译系统、通信框架、支持软件包等方面提供了非常好的支持,因此将这些无人平台的应用层算法集合命名为AcmeROS
无人系统的软件框架到目前为止可以归纳为如下图的系统结构:
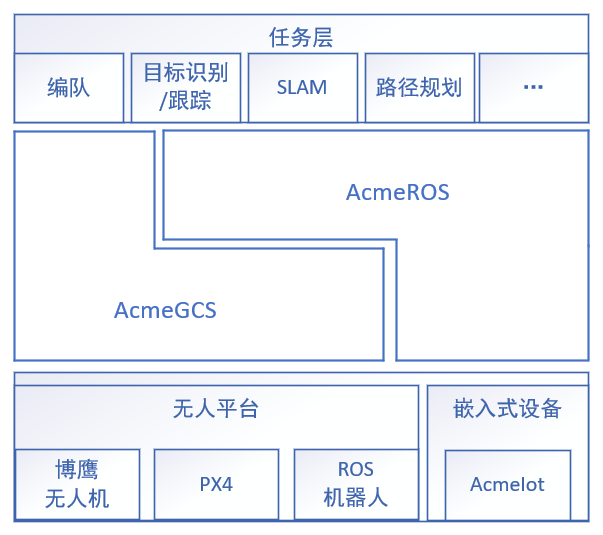
AcmeUav以这个框架构建无人系统的系统解决方案。
如上图,AcmeROS是无人系统的应用层框架,这里逐步更新一些无人系统在编队、目标识别跟踪、建图、路径规划等方面的算法与演示。
在之前的AcmeGCS演示中,已经演示了AcmeROS的一些功能:
按照上图的系统框架,AcmeGCS是用户交互终端,目标识别与跟踪算法运行在后台的AcmeROS中,AcmeROS与AcmeGCS通过ROS消息框架交互。
–
我的微信公众号,文章同步更新,欢迎关注。
